摄像机标定的机器视觉标定板说明
发布时间:2025-09-09 14:53:19 发布人:远客网络

一、摄像机标定的机器视觉标定板说明
1.确认光学系统的性能,复原相机模型的3D空间至2D空间的一一对应关系。
标定的作用其一就是为了求取畸变系数(因为经过镜头等成像后,或多或少都有畸变),其二是为了得到空间坐标系和图像坐标系的对应关系。
3.经典棋盘格标定板,实心圆阵列标定板,halcon标定板可兼容于大多数图像处理算法的标定算法。
halcon标定板兼容德国MVtech公司的Halcon和ActiveVision Tools机器视觉软件开发包。外围带边框和一个斜角,7x7圆点矩阵
即:黑色边框线为一个圆点半径1.875(直径是3.75)
边角:由黑色外边框向内缩进一个中心边距的长度(7.50mm)
这个就是halcon标定描述文件生成的一个的标定板规格
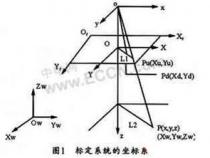
二、一种简化的线扫相机单维度标定法
线扫相机在连续性产品在线检测领域具有高精度、速度快和抗干扰能力强的优势。然而,传统的标定方法如Tsai和张氏标定法需要拍摄多个角度的标定板图像,难以满足线扫相机的特定需求,如现场安装相机、检测面非平面等。因此,本文提出了一种简化的线扫相机单维度标定法,以解决上述问题。
该标定法的核心思想是关注单维度尺寸,而非空间点的精确求取,从而简化标定流程。具体步骤如下:
为了进行标定,我们需要准备定制的标定工具——菲林片,以及开发的标定软件。菲林片由黑白相间的等距条纹组成,间距为10mm,工艺误差控制在0.04mm以内。这种设计便于现场调整相机水平度,确保图像完整无缺地捕捉到条纹。
标尺各单位对应的像素数(10mm)
标定方法的实现主要依赖最小二乘法。对于Halcon版本的代码,原理较为简单,核心在于准确求解参数,实现线扫相机的单维度标定。
为了进一步理解和应用这种标定法,以下资源可供参考:
3D高斯、工业3D视觉、自动驾驶、SLAM、三维重建、无人机等方向学习路线汇总
基于NeRF/Gaussian的全新SLAM算法
面向自动驾驶的BEV与Occupancy网络全景解析与实战
基于面结构光的高反射物体重建方法(相位偏折术)
三、鱼眼相机多线激光雷达联合标定
相机内参标定采用kalibr工具箱,对于广角鱼眼相机,推荐在误差0.2-0.3个像素范围内进行标定以获得最佳效果。若精度需求不甚严格,可使用ros中的camera_calibration工具包直接标定。标定流程包括制作标定板、配置参数、启动相机节点、调低主题频率、录制图像数据和使用Kalibr进行标定。注意,确保图像无丢帧,适当移动相机或标定板,录制数据后,使用Kalibr进行标定,获得camchain-image.yaml文件,将其中的distortion_coeffs和intrinsics参数填入算法配置文件。
联合标定算法包括外参标定,方法多样,推荐两种方式:基于目标的标定(使用标定板)和基于自然场景的标定。基于目标的标定方法如Autoware和Extrinsic Camera-LiDAR Calibration Tool,需要手动标记图像和点云中的对应点,至少选择9对。基于自然场景的标定则采用livox camera calib算法,通过提取点云和图像中的边缘特征进行匹配,最终优化求解外参以更好地对齐点云边缘和图像边缘。此方法的优点在于直接利用点云检测3D线特征,减少遮挡问题,并基于边缘特征对齐雷达和图像,适用于室内场景。